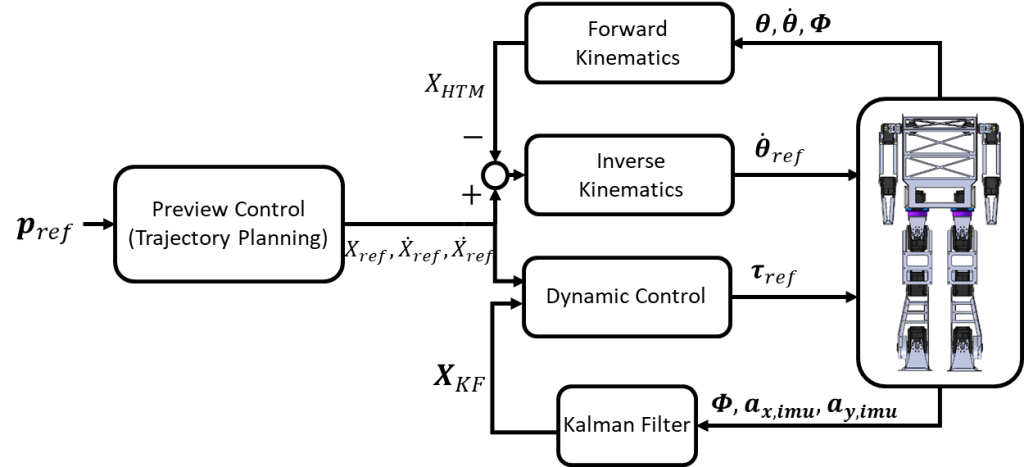
本研究旨在透過強化學習及階層化控制使雙足機器人穩定行走。階層化控制將機器人分為質心軌跡規劃與姿態控制。質心規劃根據零力矩點(zero moment point, ZMP)參考軌跡,由預觀控制(Preview Control)生成機器人質心軌跡;姿態控制混合運動學及動力學控制:運動學控制將機器人動態定錨為雙質量倒單擺系統(dual-mass inverted pendulum, DMIP),動力學控制利用踝關節之串聯彈性致動器(serial elastic actuator, SEA)進行力矩控制,使機器人質心跟隨規劃軌跡。強化學習作為預觀控制的上層架構,負責產生零力矩點參考軌跡。利用MATLAB Simscape Multibody建立物理模型進行訓練,將行走穩定度放入獎勵函數的設計,使強化學習對零力矩點參考軌跡進行最佳化,提升機器人行走的性能。本研究將此架構實現於實驗室開發之雙足機器人,利用模擬及實驗驗證此架構之性能表現。