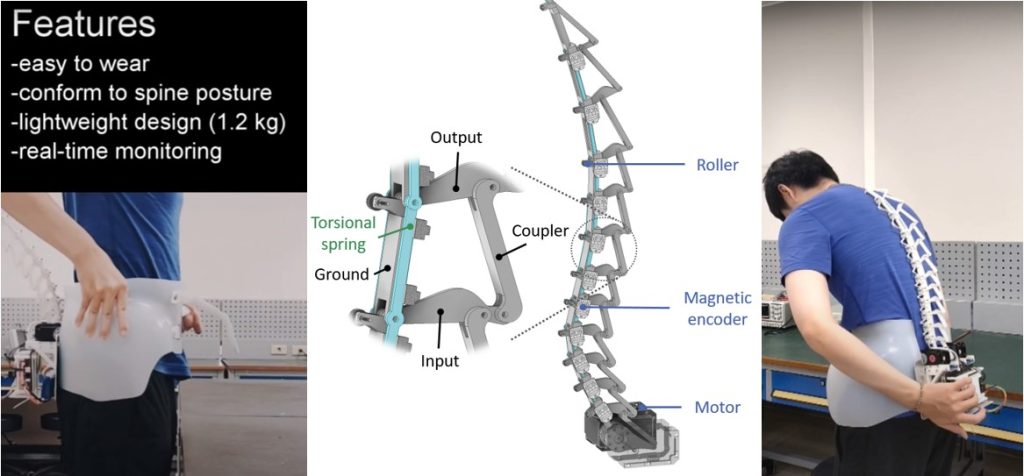
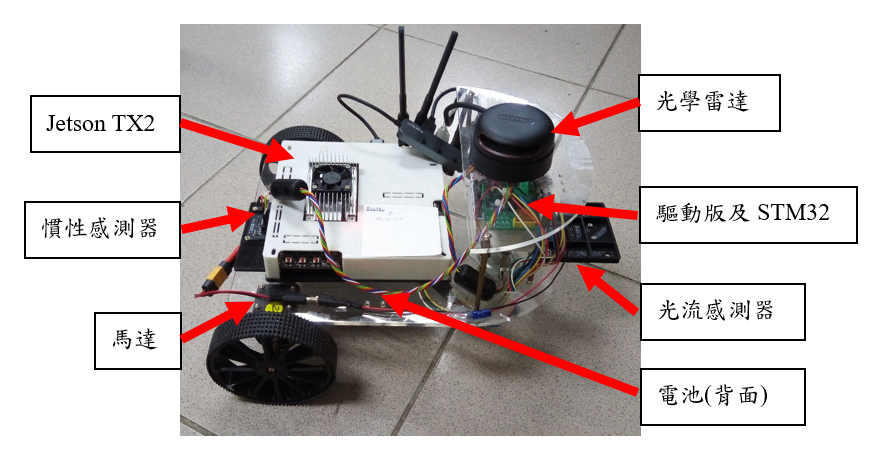
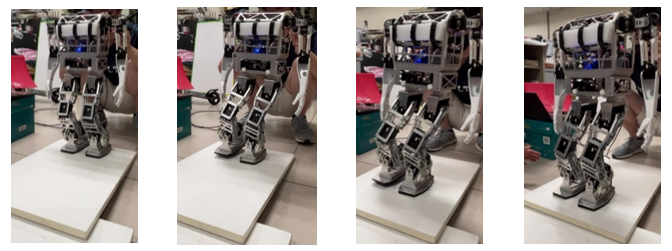
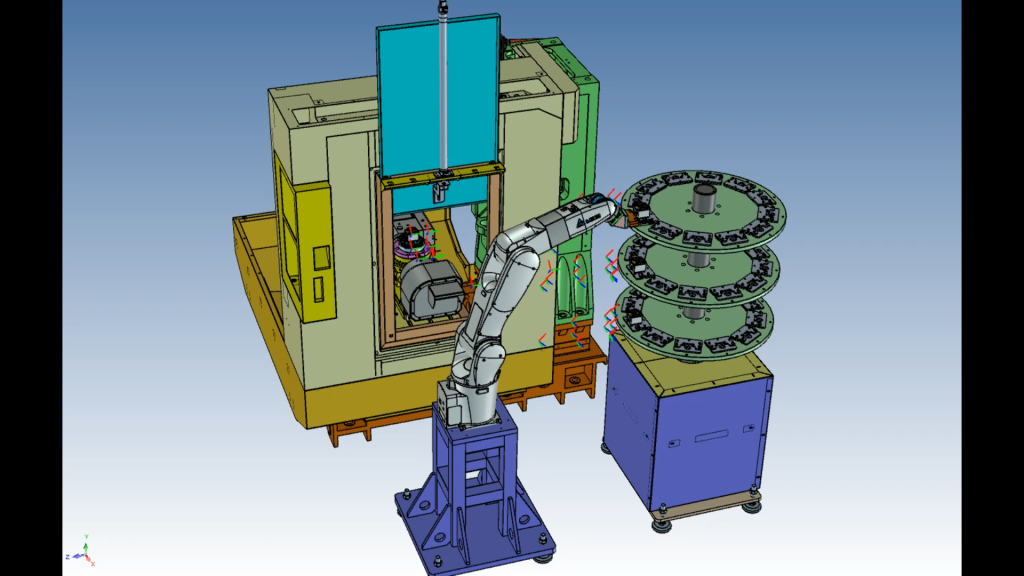
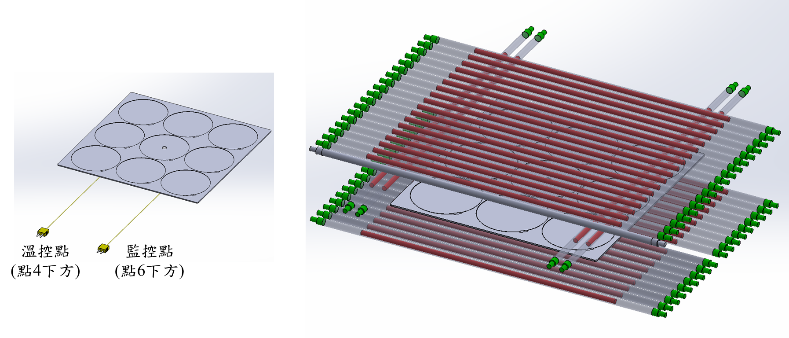
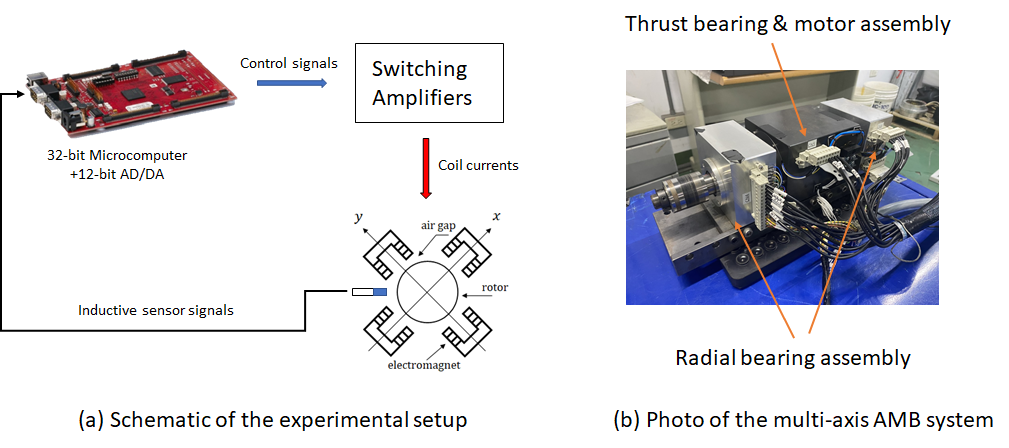
學術研究 穿戴式脊椎姿態量測裝置之設計、優化與量測校正 Read More 自行車之強健平衡控制與自動駕駛研究 Read More 四輪驅動自駕賽車之同步定位與地圖建置、導航控制及扭力引導系統研究 Read More 深度強化學習網路的建設性擴展用於廣義地圖環境下的多機器人避障及導航 Read More 應用強化學習於混成控制雙足機器人之步態規劃 Read More 具重心自適應控制之機器人騎腳踏車系統 Read More 1 2 Next » 產學合作 協作型脊椎手術機器手之控制系統開發 Read More 多軸工業機器臂避障與路徑規劃之虛實整合研究 Read More 多輸入多輸出加熱系統控制技術 Read More 高速磁浮主軸之閉迴路系統鑑別 Read More 合作廠商