Academic Research

Industry-Sponsored Research
Development of a Control System for Collaborative Spinal Surgery Robotic Manipulator

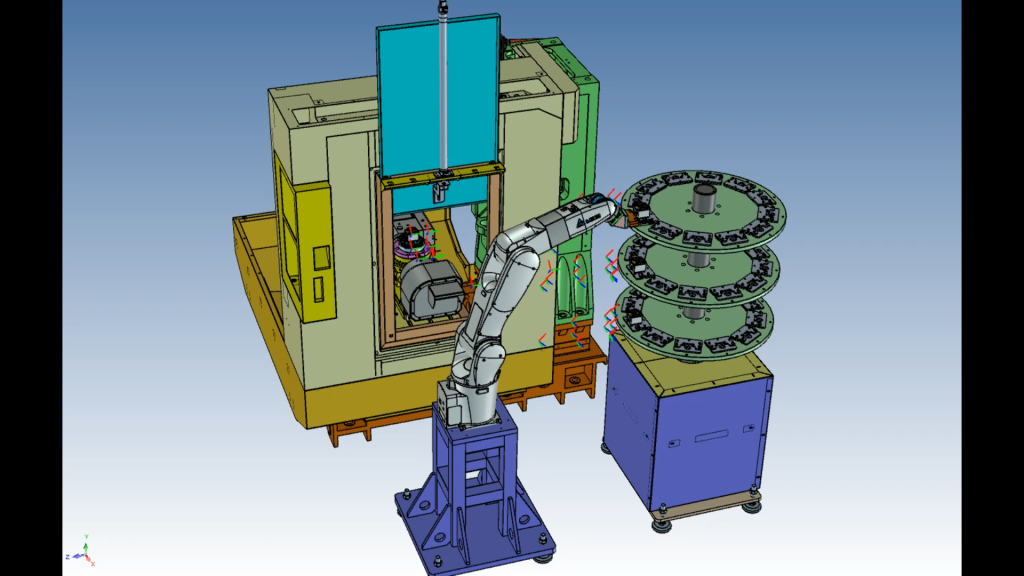
Application of Stochastic Optimization on a Multi-axis Robot Arm for Obstacle Avoidance and Trajectory Planning
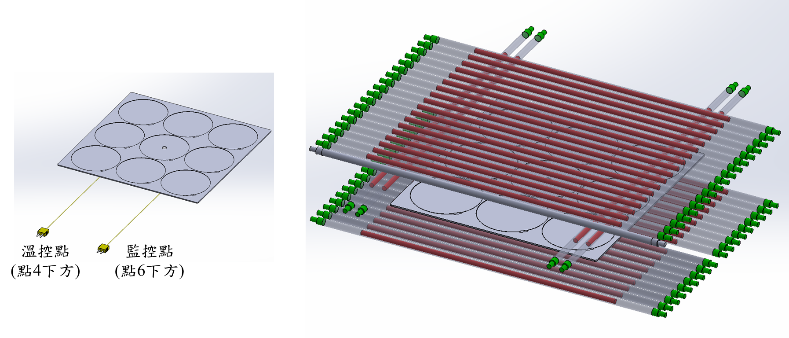
Control Design of a Multi-Input-Multi-Output Wafer Heating System
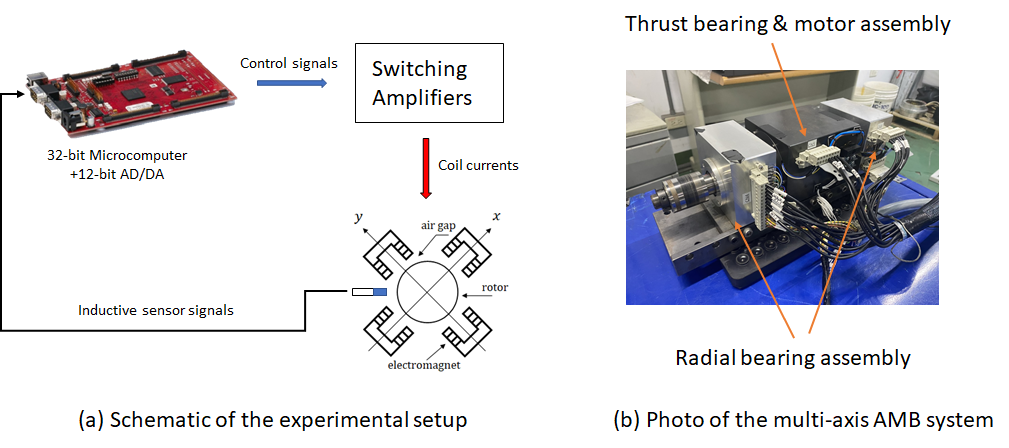
Closed-Loop System Identification of High-Speed Magnetic Levitation Spindle
Industrial Partners



