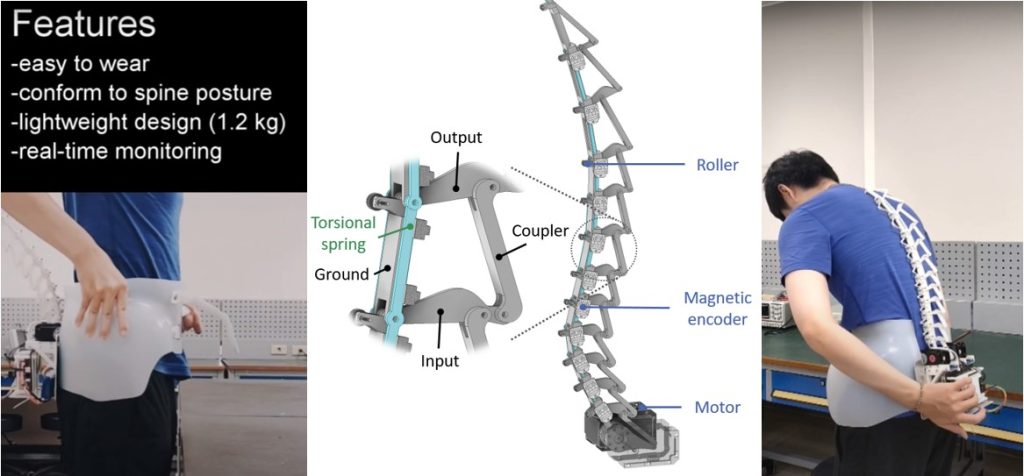
穿戴式脊椎姿態量測裝置之設計、優化與量測校正
本研究設計了一款具備 12 個自由度的新型欠致動穿戴式裝置,專門用於非臨床環境下,以非侵入的方式連續監測脊椎的 …

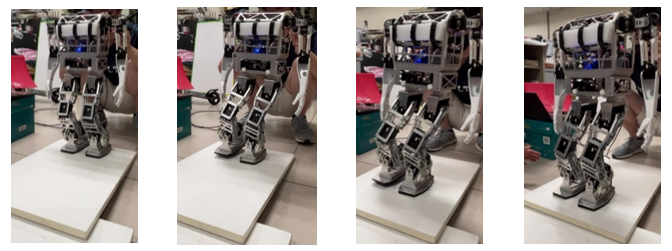
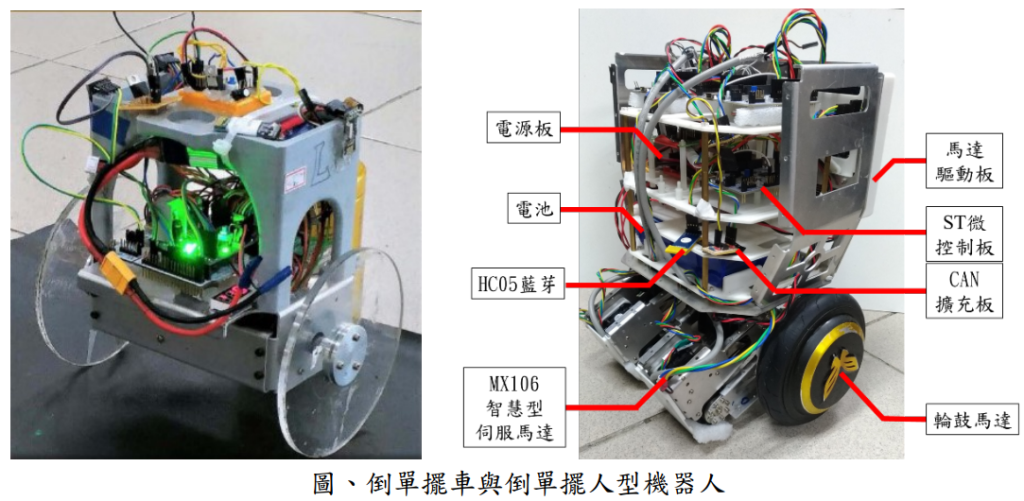
在本研究中,我們建立了一人型機器人與等同大小的腳踏車。此人型機器人被設計來踩踏、平衡與駕駛此腳踏車。我們特別專注於設計控制系統使機器人能藉由操控把手來平衡與駕駛腳踏車。我們所提出的控制系統具有估測重心的能力,因之可在未知重心位置下達到平衡的性能。此控制系統是基於一廣用的控制架構,此控制架構能在未知量測偏差的狀況下達到漸近穩定的控制效能。我們也發展了一系統化的程序來設計相關的控制參數。我們以模擬與實驗驗證控制系統能達到重心自適應的性能,特別是在重心不平衡下,使機器人控制腳踏車沿直線行駛。