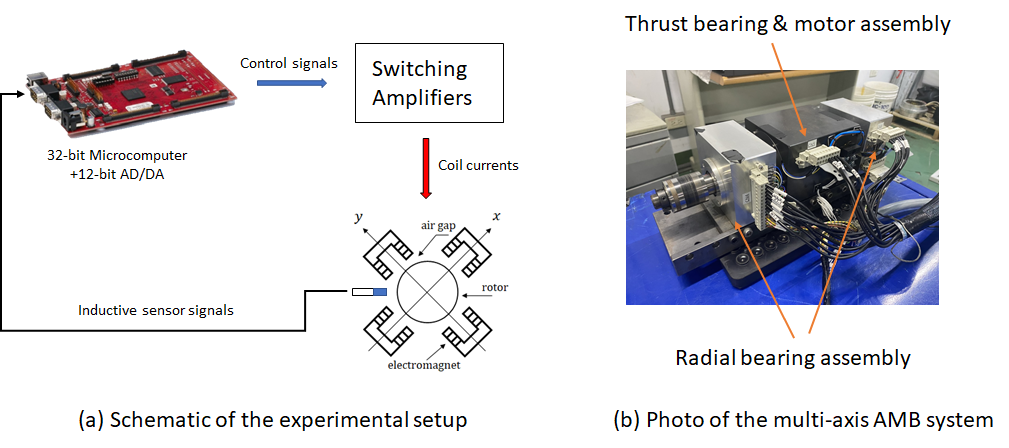
高速磁浮主軸之閉迴路系統鑑別
本研究提出了一種閉環系統鑑別方法來獲取多軸磁浮軸承系統的模型。該方法是基於時域的,在模型參數線上疊代更新的同時 …
課程大綱 本課程從機率的角度向學生介紹移動機器人和自動駕駛車輛的定位、路徑規劃和控制。 主題包括遞迴式的狀態估 …
本課程為學生提供了數位控制系統的基本知識, 包含數位控制系統的基礎、Z轉換、採樣與重建、開環與閉環系統、時間響應、穩定性分析,以及於古典控制和現代控制中的數位控制器設計。 學生亦會學到如何透過Matlab模擬與實作,將控制理論實際應用於工程問題。
本課程為控制系統一的接續,將提供學生狀態空間設計、數位控制與非線性系統的基礎知識。課程從回顧基本的線性代數開始,並介紹由線性方程式系統所構成的狀態空間。學生在這門課中將學到如何設計控制系統中的全狀態回授控制器、估測器與動態補償器。數位控制方面,會先介紹Z轉換,以及設計離散系統中等效的控制器。最後,我們將會介紹非線性系統的基本分析方法與控制工具。