This research combines a sampling-based planning (SBP) algorithm with stochastic trajectory optimization for motion planning (STOMP) to enable a multi-axis industrial robot arm to generate an obstacle-avoiding motion path according to the operating environment and task requirements. The SBP algorithm is used due to the large search space of the multi-axis industrial robot arm, which makes it impossible to directly calculate an effective path. The SBP algorithm performs random sampling to explore the space, avoid obstacles and find a path between the start and end points. The STOMP method involves iteratively adding noise to the initial trajectory generated by SBP to explore the search space around it. The effectiveness of the combined search method is verified by simulations and experiments using Delta’s 6-DOF robotic arm.
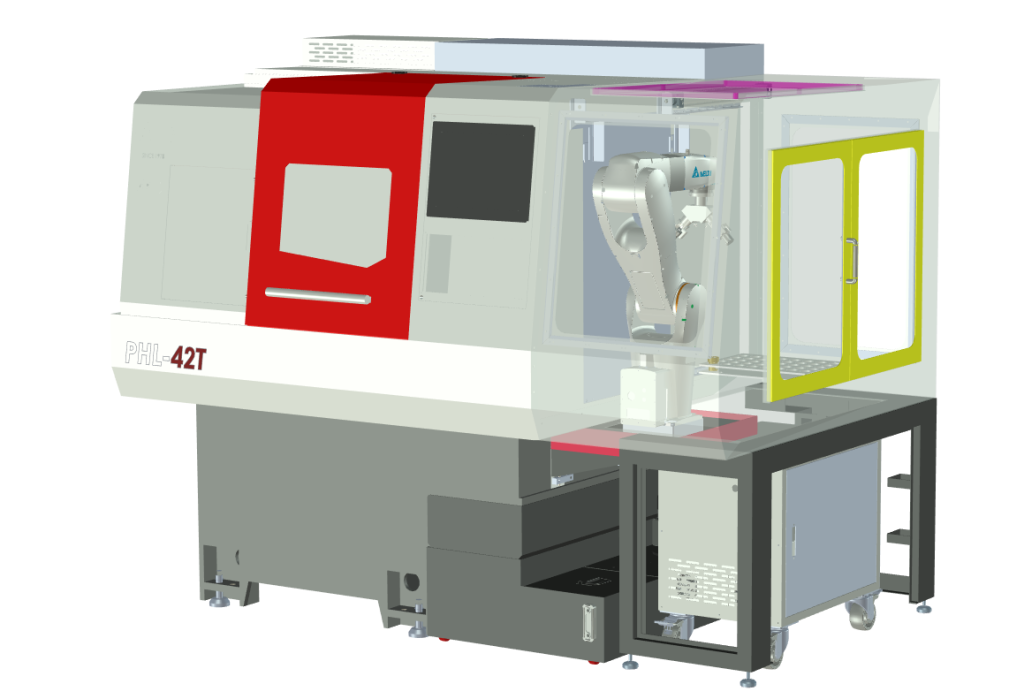
Figure 1. Multi-axis industrial robot arm picking up and placing materials on machining center.
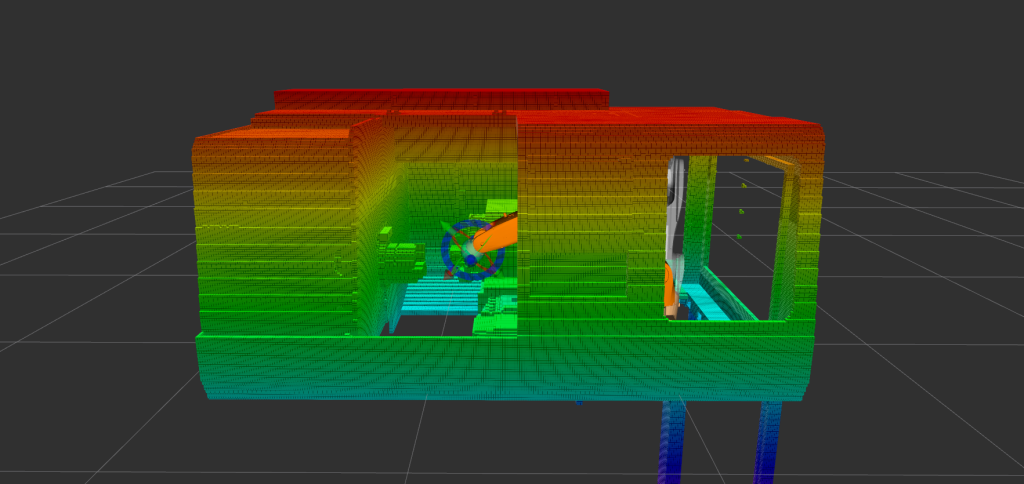
Figure 2: Simulation of obstacle avoidance and path planning for workpiece picking and placing by multi-axis industrial robot arm.