Academic Research
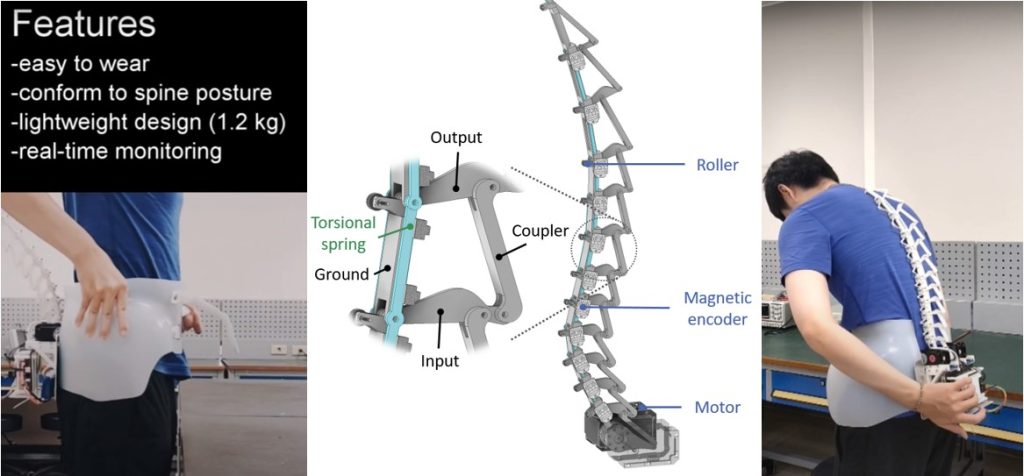
Design, Optimization, and Calibration of a Wearable Spinal Posture Measurement Device
Balancing and Trajectory Control of a Self-Driving Bicycle

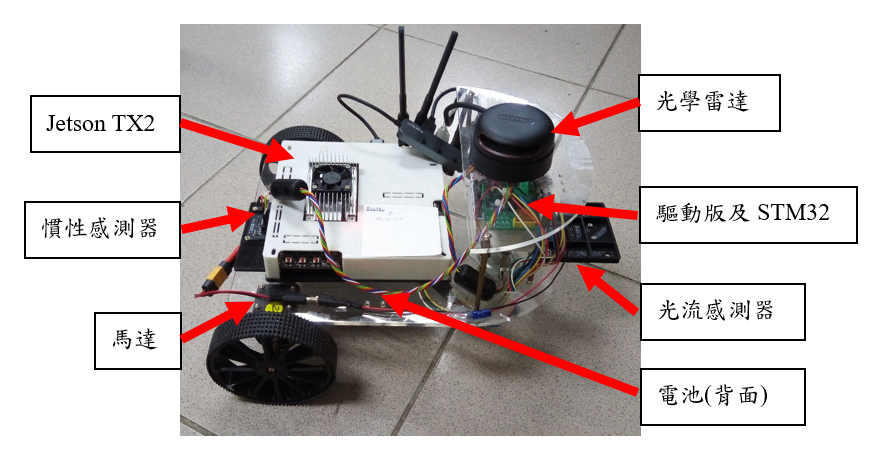
SLAM, Navigation and Torque Vectoring for a Four-Wheel-Drive AWD Autonomous Electric Racing Vehicle

Constructive Extension of Deep Reinforcement Learning Network for Multi-Robot Obstacle Avoidance and Navigation in Generalized Map Environment
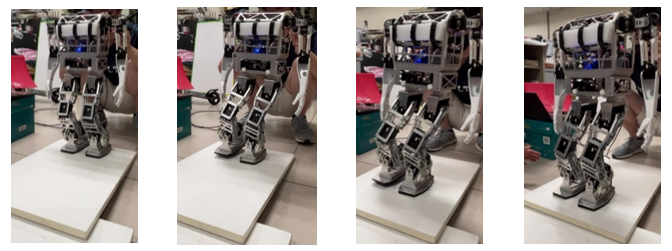
Reinforcement Learning Optimization of Optimalwalking Walking trajectory Trajectory for a bipedal Bipedal robot Robot under Hybrid Kinematics/Dynamics Control
Balancing Control of a Robot Bicycle with Uncertain Center of Gravity

Industry-Sponsored Research
Development of a Control System for Collaborative Spinal Surgery Robotic Manipulator

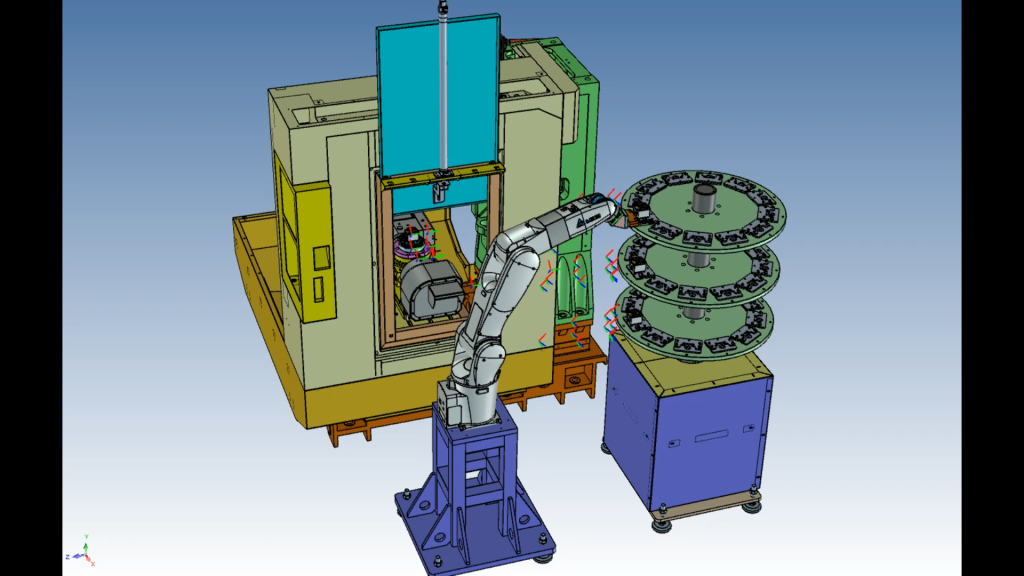
Application of Stochastic Optimization on a Multi-axis Robot Arm for Obstacle Avoidance and Trajectory Planning
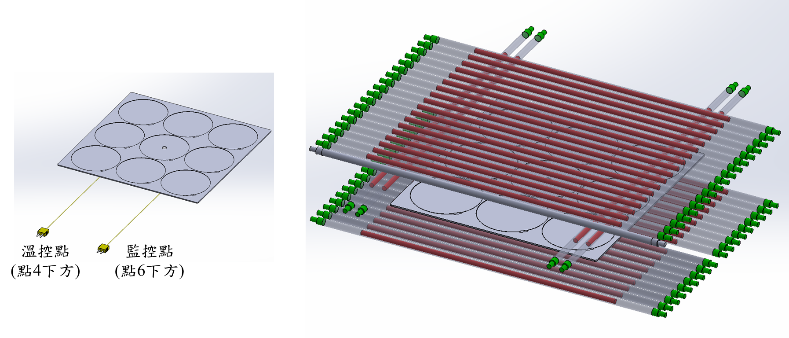
Control Design of a Multi-Input-Multi-Output Wafer Heating System
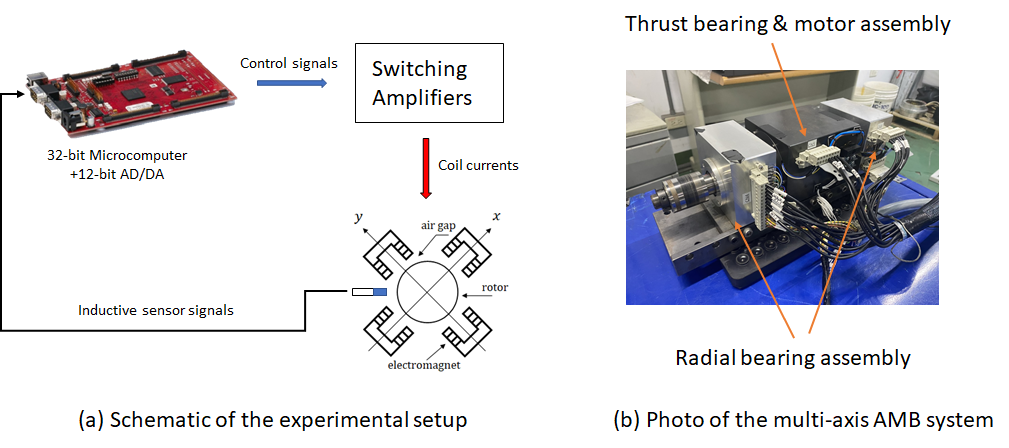
Closed-Loop System Identification of High-Speed Magnetic Levitation Spindle
Industrial Partners



