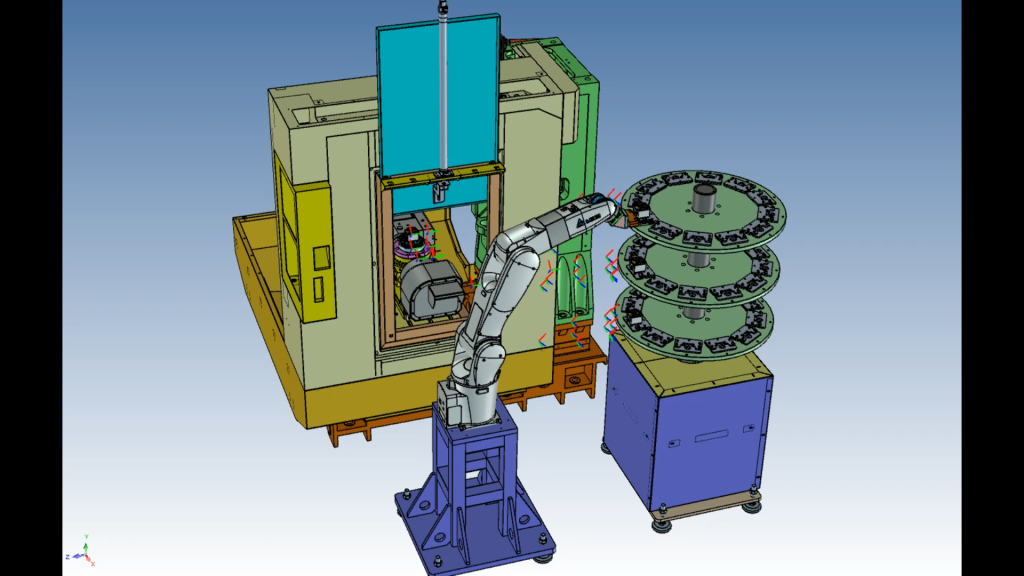
Application of Stochastic Optimization on a Multi-axis Robot Arm for Obstacle Avoidance and Trajectory Planning
This research combines a sampling-based planning (SBP) algorithm with stochastic trajectory optimization for motion planning (STOMP) to enable a multi-axis industrial robot arm to generate an obstacle-avoiding motion path according to the operating environment and task requirements. The SBP algorithm is used due to the large search space of the multi-axis industrial robot arm, which …