Design, Optimization, and Calibration of a Wearable Spinal Posture Measurement Device
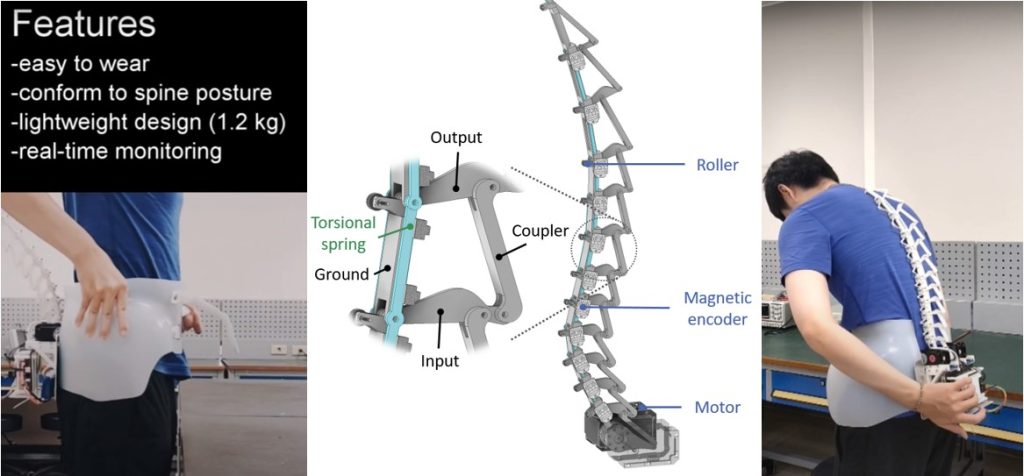
This study presents a novel 12-degree-of-freedom underactuated wearable device specifically designed for continuous, noninvasive monitoring of spinal posture in nonclinical environments. By integrating a static model with a genetic algorithm for geometric parameter optimization, the device achieves adaptability to multi-DOF spinal motion while minimizing both weight and structural complexity, thus ensuring user comfort. In addition, …
Design, Optimization, and Calibration of a Wearable Spinal Posture Measurement Device Read More »