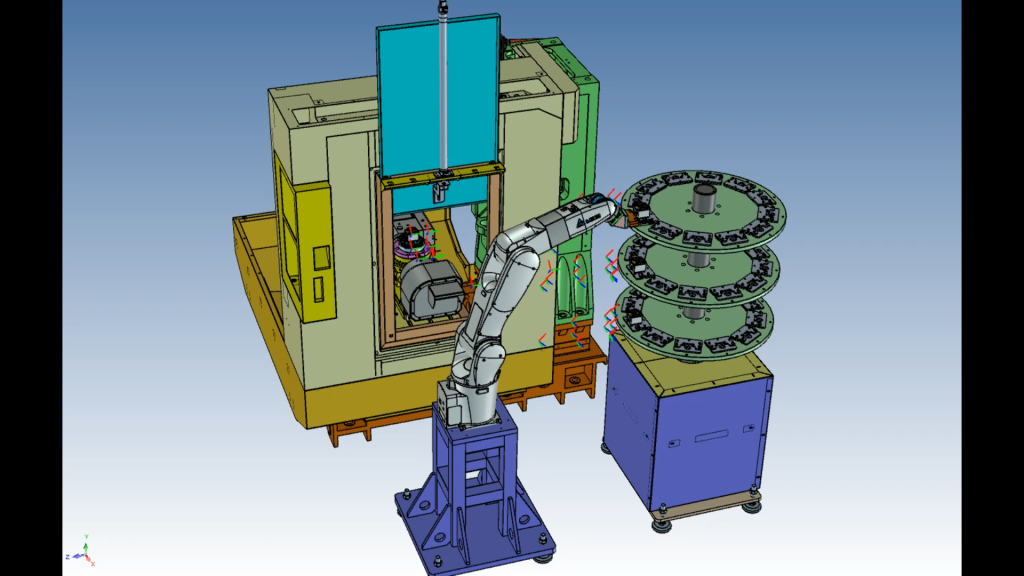
多軸工業機器臂避障與路徑規劃之虛實整合研究 產學合作 本研究的目的在使多軸工業機器臂可依據操作環境及任務需求產生可避障的移動路徑,並將路徑依據不同的目標進行最佳化。 … 多軸工業機器臂避障與路徑規劃之虛實整合研究 閱讀全文 »
協作型脊椎手術機器手之控制系統開發 產學合作 相較於一般用於工業機器臂的串聯式設計,並聯式機器手能以緊致的體積與重量承受高負載,且具有高剛性與高精度的優點, … 協作型脊椎手術機器手之控制系統開發 閱讀全文 »